Steuerung
Die Steuerung hat in diesem Projekt zwei Hauptaufgaben:
1. Der Parabolspiegel muss immer der Sonne nachgeführt werden.
2. Die Zirkulation des Energieträgers muss gewährleistet sein, damit die Energiegewinnung optimal ist und der Absorber nicht überhitzt.
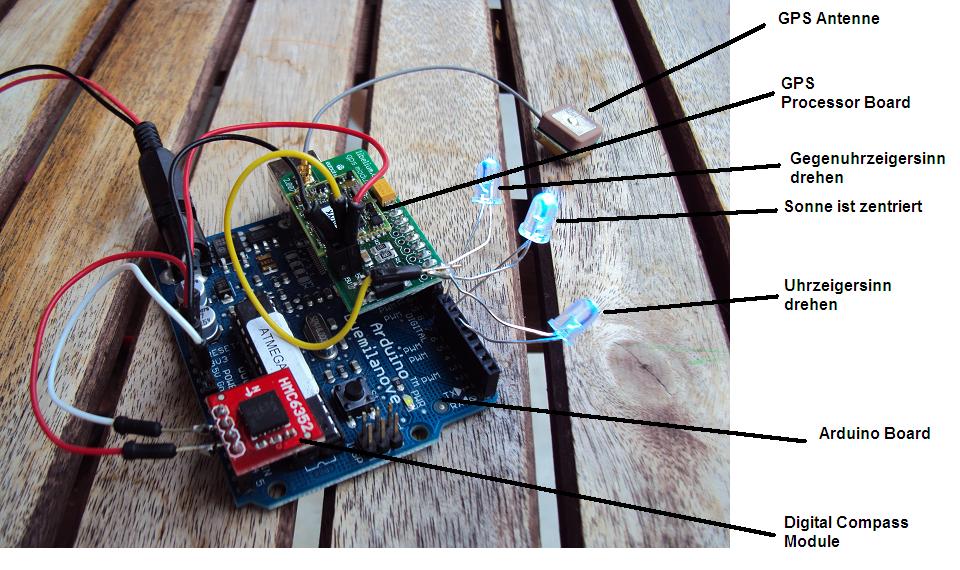
Als Steuerung setze ich das Mikrokontrollerboard Arduino ein.
Arduino ist Open Source und eignet sich ausgesprochen gut um kleinere Projekte zu realisieren.
Ausserdem gibt es zu Arduino bereits sehr viele preiswerte Zusatzmodule, welche ohne grossen Aufwand eine modulare Erweiterung der Steuerung zulassen.
Sonnennachführung:
Damit der Parabolspiegel der Sonne nachgeführt werden kann, muss man den aktuellen laufend berechnen und desweiteren wissen in welche Richtung der Spiegel gerade ausgerichtet ist.
Ich habe mir zum Ziel gesetzt, eine Steuerung zu bauen, welche ohne Anpassungen auf der ganzen Welt eingesetzt werden könnte.
Dies bedingt, dass die Anlage das Datum, die Uhrzeit, den Längen- und Breitengrad selber ermitteln kann.
Den dies sind exakt die Mindestangaben welche benötigt werden damit der aktuelle Sonnenstand berechnet werden kann.
Ein GPS-Modul kann alle diese Werte im Sekundentakt mitteilen.
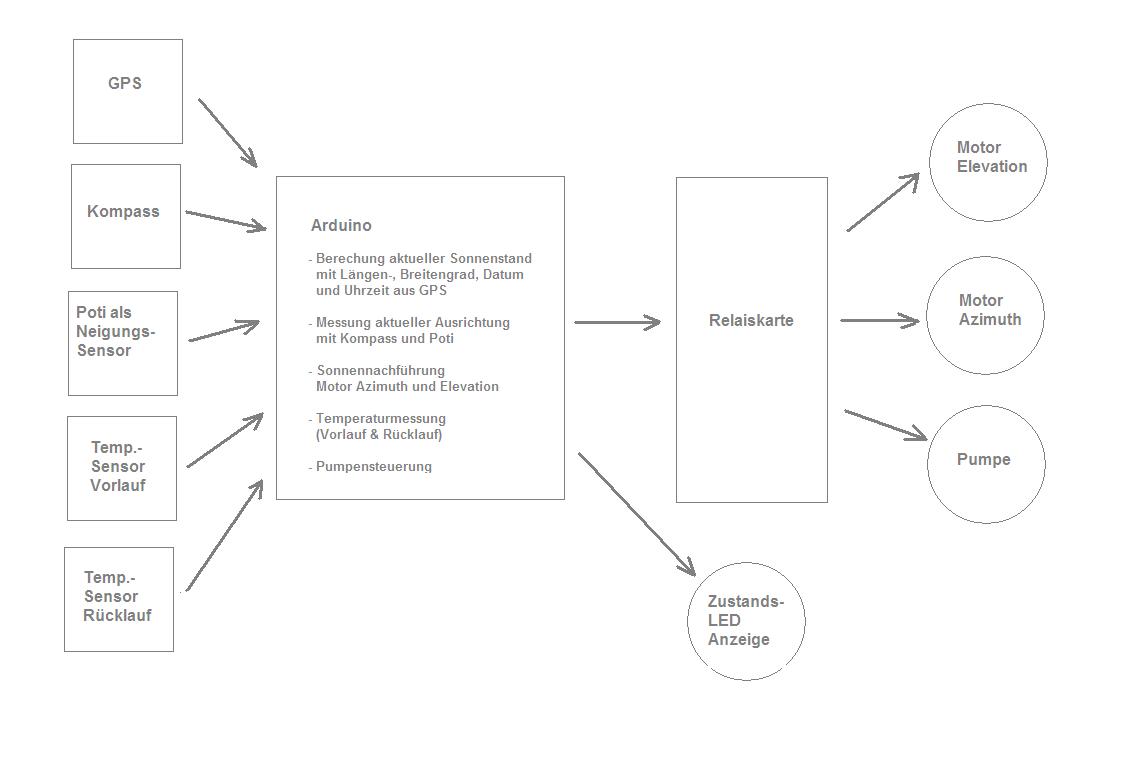
Die aktuellen Werte des GPS Modul werden an die Formel zur Berechnung des Sonnenstandes übergeben.
Die Formel berechnet damit die beiden Winkel für Azimuth und Elevation des aktuellen Sonnenstand.
(Azimuth bedeuetet die Kompassausrichtung in Grad und Elevation der Winkel über dem Horizont.)
Sind diese beiden Winkel berechnet, muss der Parabolspiegel danach ausgerichtet werden.
Damit man die beiden Motoren richtig ansteuern kann müssen aber die aktuellen Winkel mit Sensoren gemessen werden.
Für Azimuth (Kompassaurichtung) bietet sich ein digitales Kompassmodul an. Damit kennt der Mikroprozessor jederzeit die aktuelle Ausrichtung der Anlage als Winkelwert zwischen 0 und 360 Grad (0 = Norden / 180 = Süden).
Um den Winkel der Elevation zu messen, habe ich mich für ein hochpräzises Potentiometer entschieden. Dieses Potentiometer wird direkt mit der mechanischen Achse der Höhenverstellung verbunden. Dabei wirkt es als einfacher Spannungsteiler woraus der Mikrokontroller mit der gemessenen Spannung ein Winkel zwischen 0 und 90 Grad berechnet.
Am morgen (sobald errechneter Wert Elevation grösser 0 Grad ist) beginnt die Anlage den Parabolspiegel auszurichten. Die Ausrichtung geschieht wetterunabhängig, aufgrund errechneter Werte. Den ganzen Tag wird die Nachrichtung durchgeführt. In welchen Intervallen dies geschehen muss, wird sich erst in einem Echttest zeigen. Vorläufig habe ich eine Gradabweichung grösser 5 Grad als Ausrichtkriterium definiert. Der Parabolspiegel wird also schrittweise ausgerichtet. Am Abend (sobald Elevation kleiner oder gleich 0 Grad ist) wird die Ausrichtung unterbrochen, bis wieder morgen ist.
Sollte der GPS keine gültigen Daten empfangen, wird die Ausrichtung ebenfalls unterbrochen und der Spiegel in die "windsichere" Ruhestellung gebracht. Diese "Ruhestellung", flach zum Horizont (Fläche zum Himmel), stellt sicher dass die Anlage eine kleine Angriffsfläche zum Wind bietet und der Brennpunkt die Anlage bei forschreitendem Sonnenstand nicht streifen und damit Schäden anrichten kann).
Wärmeregulierung / optimale Energieausbeute:
Damit die Steuerung die Zirkulation des Energieträgers optimal steuern kann, muss mindestens die Temperatur des Vorlauf des Rücklauf bekannt sein. Mit diesen beiden Temperaturwerten lässt sich die "kritische" Differenztemperatur bestimmen, ab wann der Energieträger (z.B. Wasser) in der Leitung umgewälzt werden muss.
In erster Linie geht es darum diese Umwälzung opmtimiert zu steuern,
damit moglichst viel Energie aus der Anlage ausgebeutet werden kann.
Gleichzeitig wird damit aber auch die Betriebssicherheit sichergestellt. Denn würde die Umwälzung ausbleiben, würde das Wasser in der Leitung zu Dampf gekocht werden (Explosionsgefahr) und schliesslich auch der Absorber durch eine Überhitzung zerstört werden.
Wie schnell sich das zirkulierende Wasser im Absorber erhitzen wird und wie hoch die Durchflussrate in der Leitung sein muss, werde ich erst in einem ersten Feldtest bestimmen können. Ich bin aber zuversichtlich dass meine Wasserpumpe ausreichend Durchfluss erzeugt,
damit die Temperatur des Absorbers unter dem Siedepunkt von Wasser gehalten werden kann.
Später werde ich in der Software eine Sicherheitsfunktion einprogrammieren, welche den Parabolspiegel im Falle einer drohenden Überhitzung (gewonnene Energie kann nicht mehr ausreichend abgeführt werden) flach gegen den Himmel kippt.
Dadurch wandert der Brennpunkt kurzfristig aus dem Absorber und die komplette Energie wird zum Himmel reflektiert.
Hat sich der Absorber genügend abgekühlt, soll die Anlage den Normalbetrieb wieder aufnehmen und wieder auf die richtige Position zurückfahren.
Mit einer späteren Optimierung soll erreicht werden, dass die Umwälzpumpe nur so wenig wie auch nötig läuft (schliesslich soll mit der Umwälzung nicht mehr eletrische Energie verbraucht werden, als die Anlage an thermischer Energie liefert).
Ausserdem darf es nicht passieren, dass umgewälzt wird, obwohl die Vorlauftemperatur (Boiler) höher als der zu erwartende Rücklauf ist.
Im ersten Schritt werde ich die Umwälzpumpe (eine normale 12V Wasserpumpe) mit einem Relais im Ein-/Aus-Betrieb einsetzen.
Dabei besteht die Gefahr, dass bei ausgeschalteter Umwälzung die maximal zulässige Temperatur am Absorber überschritten wird, obwohl Vor- und Rücklauf Normalwerte messen. Die vermeide ich damit, dass der Temperatursensor des Rücklauf direkt am Absorber installiert wird. Damit ist sichergestellt dass die Steuerung rechtzeitig eine Überhitzung der Anlage feststellen kann.
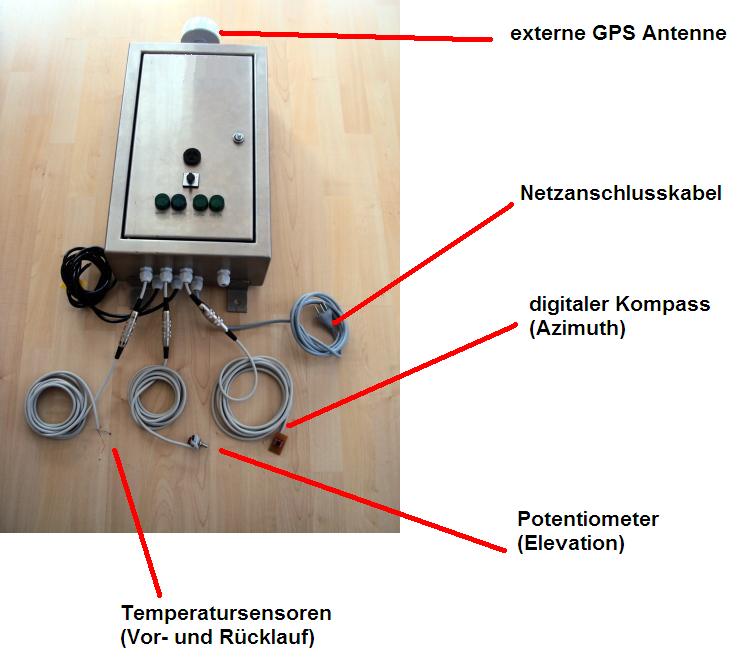
Die komplette Steuerung muss wetterfest verpackt montiert sein, damit Kälte, Hitze, Feuchte und Trockenheit die Bauelemente nicht beschädigen.
Im Abfall habe ich einen alten Steuerschrank gefunden, welcher sich perfekt für das Vorhaben eignet.
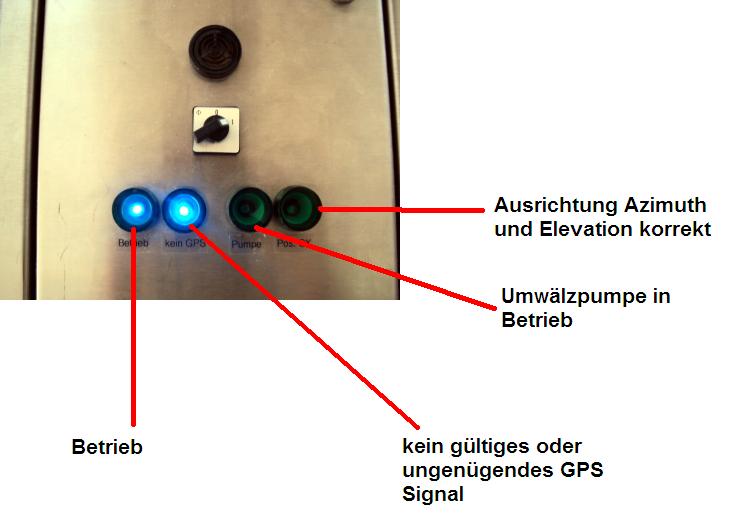
Die vier Fensterleuchten habe ich mit LED ausgestattet und benutze diese als Statusanzeige,
die bereits bestenden Löcher mit PG-Nippel zur Kabeldurchführung für Sensoren und Motoren ausgerüstet,
den Netzschalter verwende ich weiterhin als Hauptschalter der Stromversorgung
und die obere Bohrung wird als Halterung und Kabeleingang für die externe GPS-Antenne eingesetzt.
Der Schrank ist zur Zeit noch etwas überdimensioniert, doch in Anbetracht dass die Anlage später im Solarbetrieb und unabhängig von der Netzspannung funktionieren soll,
wird mit dem Laderegler und den Akkus sicher noch zusätzlicher Platz gebraucht.
Die ganze Elektronik ist so spritzwasserfest untergebracht und von aussen leicht zu bedienen.
Der Arduino ist nicht fix auf die Leiterplatte gelötet, sondern nur gesteckt. Dies ermöglicht einen schnellen und einfachen Austausch.
Komplettansicht mit Steuerschrank, GPS Antenne und diversen Anschlusskabel für Sensoren & Motoren |
Frontansicht |
Bedienelemente - Ein-/Ausschalter, 4 x Statusanzeige |
Innenansicht Verkabelung & Leiterplatten |
 |
 |
 |
 |